



{kind=link}
Att förutsäga exakt var en robot kommer att stanna beror på ett antal olika variabler inklusive hastighet, nyttolast och robotens eget tröghetsmoment. Dessa faktorer, var för sig eller tillsammans, kan resultera i att roboten stannar utanför sin egen säkerhetszon, ibland med flera meter. För att kompensera för variationerna i stoppsträckor tar ingenjörerna som designar robotceller ofta till i överkant för att medge extra rörelser när roboten stannar upp, något som tar upp onödig yta på fabriksgolvet.
SIMULERINGAR MED MILLIMETERPRECISION
Den nya RobotStudio-funktionen använder ABBs dokumenterat vassa teknik för rörelsestyrning för att förutsäga robotens rörelser med millimeterprecision. Detta möjliggör simulering av robotens exakta rörelser i RobotStudio, så att användaren kan fastställa korrekt storlek på den säkerhetszon som krävs och den idealiska platsen för olika funktioner, inklusive ljusgardiner, skyddsräcken och styrenheter.
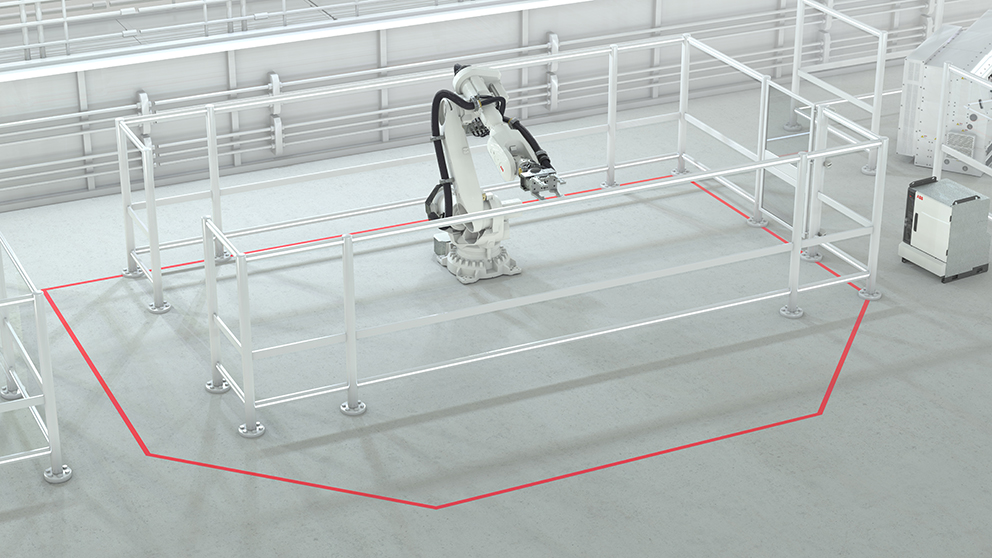
För tillämpningar som använder ABBs programvara SafeMove kan data om robotens slutliga position användas för att fastställa storleken på ”gröna ”, ”gula ” och ”röda ” zoner där roboten antingen fortsätter att arbeta, saktar ned eller stannar helt, beroende på var operatören befinner sig. Detta är särskilt praktiskt i kollaborativa tillämpningar där operatörerna behöver känna sig trygga med att roboten har stannat innan man går fram till den.
– Vår nya funktion i RobotStudio för robotbromssträckor förser användaren med information om en robots verkliga rörelser med en oöverträffad noggrannhetsnivå, säger Antti Matinlauri, och påpekar att lösningen kan innebära upp till 25 procents minskat behov av golvyta när man ska designa och bygga en robotcell eller sätta upp en säkerhetszon.
– Detta hjälper våra kunder att optimera processerna och få ut maximalt av sina automationslösningar.

Den virtuella funktionen för robotbromssträckor är en av ett antal nedladdningar som finns av RobotStudio på https://new.abb.com/products/robotics/robotstudio/downloads.

