



{kind=link}
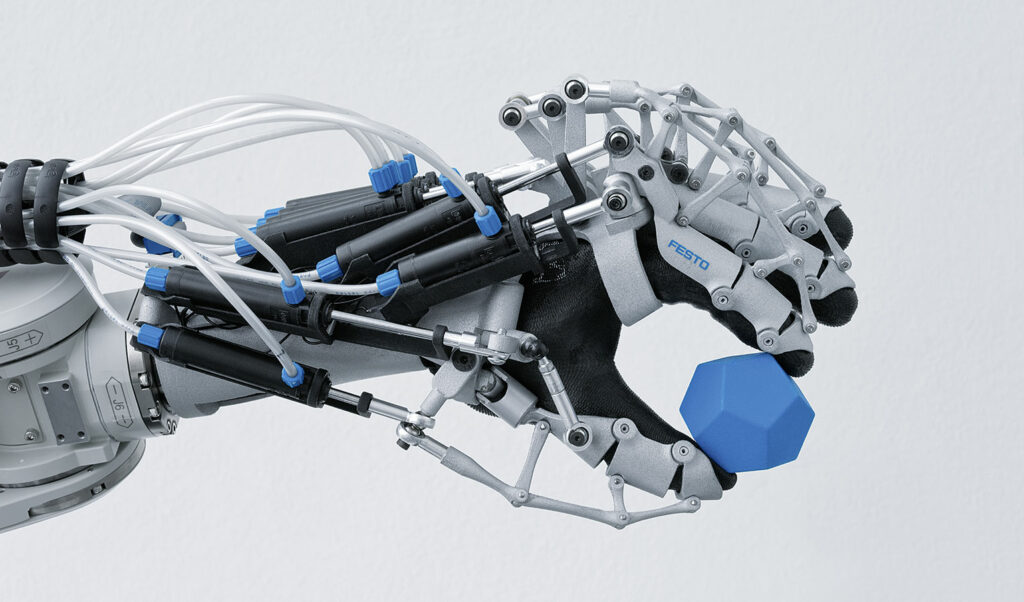
Oavsett om den griper, håller eller vrider, rör, skriver eller pressar – i vardagen använder vi våra händer som en självklarhet för de mest varierande uppgifterna. I det avseendet är den mänskliga handen, med sin unika kombination av kraft, fingerfärdighet och fina motoriska färdigheter ett naturligt mirakelverktyg. Vad kan vara mer naturligt än att utrusta robotar i samverkande arbetsytor med en gripare som modelleras efter denna modell av naturen, som löser olika uppgifter genom att lära sig genom artificiell intelligens? Festo visade den pneumatiska roboten BionicSoftHand på den nyligen avhållna Hannovermässan. I kombination med BionicSoftArm, en pneumatisk lättviktsrobot, är Future Concepts lämpliga för humanrobot samarbete.
Artificiell intelligens
En maskins inlärningsmetoder kan jämföras med människors: antingen positivt eller negativt – maskiner behöver feedback efter deras handlingar för att klassificera och lära av dem. BionicSoftHand använder metoden för förstärkningslärande.
Detta betyder: istället för att imitera en specifik åtgärd, ges handen bara ett mål. Det använder test- och felmetoden för att uppnå sitt mål. Baserat på mottagen feedback optimerar den gradvis sina handlingar tills uppgiften är slutligen lösas framgångsrikt.
Specifikt bör BionicSoftHand rotera en 12-sidig kub så att en tidigare definierad sida pekar uppåt i slutet. Den nödvändiga rörelsestrategin lärs i en virtuell miljö med hjälp av en digital tvilling, som skapas med hjälp av data från en djupgående kamera via datasyn och algoritmerna för artificiell intelligens.
Proportionella piezoventiler för exakt kontroll
För att hålla BionicSoftHand så liten som möjligt, har utvecklarna speciellt konstruerat en liten, digitalt styrd ventiler som är monterad direkt på handen. Detta innebär att rören för styrning av gripfingrarna inte behöver dras genom hela robotarmen. Således kan BionicSoftHand snabbt och enkelt anslutas och drivas med endast ett rör vardera för tilluft och avgaser. Med de proportionella piezoventilerna används, kan fingrarnas rörelser regleras exakt.
BionicSoftArm: En robotarm, många möjliga variationer
Den strikta separationen mellan fabriksarbetarens manuella arbete och robotens automatiska handlingar läggs alltmer åt sidan. Deras arbetsområden överlappar varandra och sammanfogar sig i ett samverkande arbetsutrymme. På så sätt kan människor och maskiner samtidigt arbeta tillsammans på samma arbetsstycke eller komponent i framtiden – utan att skydda varandra av säkerhetsskäl.
BionicSoftArm är en kompakt vidareutveckling av Festos BionicMotionRobot, vars tillämpningsområde har ökat avsevärt. Detta möjliggörs genom sin modulära design: Den kan kombineras med upp till sju pneumatiska bälgssegment och roterande enheter. Detta garanterar maximal flexibilitet när det gäller räckvidd och rörlighet, så att den kan arbeta runt hinder även i de tättaste utrymmena om det behövs. Samtidigt är det helt flexibelt och kan fungera säkert med människor. Direkt humantrobotsamarbete är möjligt med BionicSoftArm, såväl som dess användning i klassiska SCARA-applikationer, såsom pick-and-place-uppgifter.
Flexibla applikationsmöjligheter
Modularroboten kan användas för en mängd olika applikationer, beroende på design och monterad gripare. Tack vare sin flexibla kinematik kan BionicSoftArm interagera direkt och säkert med människor. Samtidigt gör kinematiken det enklare att anpassa sig till olika arbetsuppgifter på olika ställen i produktionsmiljöer: eliminering av kostsamma säkerhetsanordningar som burar och ljusbarriärer förkortar konverteringstiderna och möjliggör sålunda flexibel användning – helt i enlighet med adaptiva och ekonomisk produktion

