



{kind=link}
Denna nya innovativa lösning för fordonstillverkning kombinerar 12 robotar för att erbjuda ett utrymmessparande alternativ till traditionella robotlösningar för interiörmålning, vilket hjälper tillverkare att minska storleken på sina målningsstationer med upp till 33 procent samtidigt som de har möjlighet att måla flera olika fordonstyper, från bilar och SUVar till minibussar.
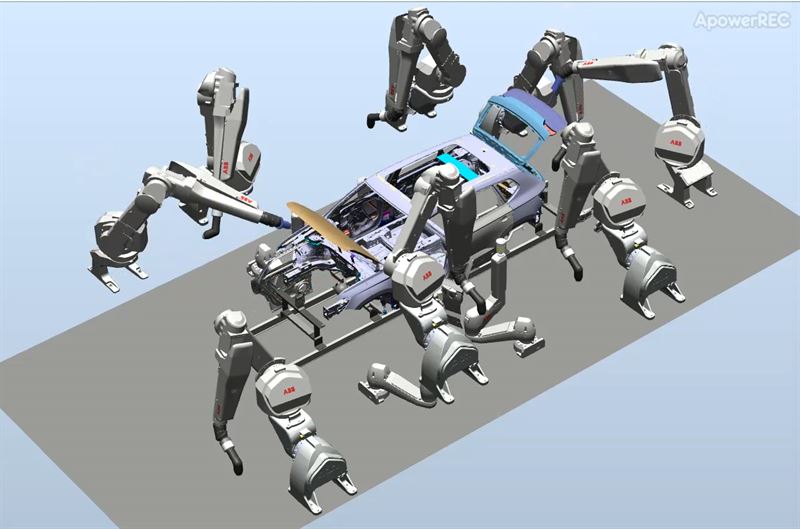
SÅ HÄR SER UPPLÄGGET UT
Konfigurationsupplägget är att fyra IRB 5350-robotar är installerade för att öppna dörrar, medan två IRB-5500-22-robotar används för att öppna motorhuv och baklucka. Nyckeln till den kompakta lösningen är kapaciteten som ges av sex av ABB:s nya 7-axliga IRB 5500-27-robotar.
Jörg Reder menar att man med ett klassledande omfång på 3,8 meter och med alternativ för montering på golv, väggar eller inverterad montering med den utvidgade räckvidden för IRB 5500-27 kan möjliggöra för roboten att nå längre över en bilkaross än andra robotlösningar. Den förbättrade arbetsvinkeln minskar antalet robotar som behövs för att utföra en specifik uppgift och tar bort behovet för en åkbana.
– Genom att avlägsna behovet av extrautrustning, som åkbanor och ytterligare ventilatorer, kan stationen Compact Interior Paint hjälpa till att avsevärt minska tiden och kostnaden för att sätta upp ett måleri. Med sin förmåga att passa in i olika monteringskonfigurationer, och med färre föremål som behöver installeras och underhållas, presenterar den en idealisk lösning för eftermontering i befintliga målningslokaler, säger Reder.
ROBOTAR SOM KOMPENSERAR FÖR VARANDRA
Men som sagt, den utökade räckvidden är en viktig poäng. Den möjliggör för roboten att optimera vinkeln för färgmunstycket i förhållande till ytan som ska målas, vilket hjälper till att minska färgåtgången genom att minimera översprutning. Samtidigt minskas behovet av ventilation och belysning på golvet genom de platsbesparingar som uppnås med ABBs station, Compact Interior Paint, vilket bidrar till att göra målerierna mer hållbara och kostnadseffektiva.
En annan fördel är robotens förmåga att kunna kompensera för roboten intill för att upprätthålla produktiviteten. I händelse av ett fel kommer den återstående fungerande roboten att gå in i kompensationsläge genom att antingen öka hastigheten för att täcka båda robotarnas arbete eller öka cykeltiden för att täcka för den icke-fungerande roboten tills den åter kan tas i drift.

ROBOTARNA KAN JOBBA NÄRA VARANDRA GENOM PROGRAMVARA
Användningen av ABB:s programvara SafeMove säkerställer att robotarna kan arbeta i närheten av varandra. Genom att ställa in varje robots arbetsomfång som en säkerhetszon och använda den för att kontrollera deras hastighet och rörelse tas risken bort för en kollision eller utlösning av ett nödstopp. Användningen av SafeMove hjälper också till att förhindra skador på personal som kan behöva komma in i båsen då robotarna stoppas automatiskt så snart de känner av en person.

